研究詳細
RESEARCH

Research and Industry-Academia Collaboration
研究・産学連携
N-HuRo:ニューロモルフィック・ヒューマノイド・ロボティクス
概要
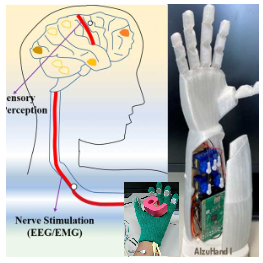
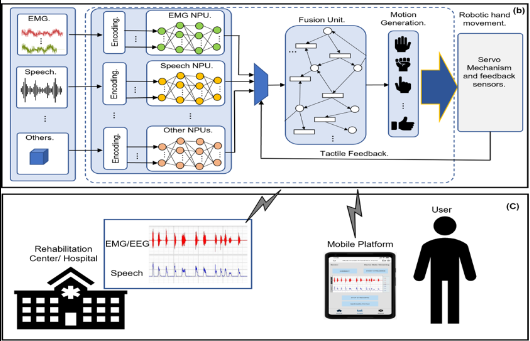
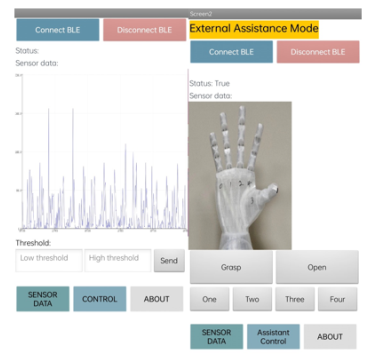
私たちは、神経科学、AI、ニューロモルフィック計算、ロボティクスを統合し、人の意図や動的環境に適応する次世代自律システムの研究を進めています。ニューロモルフィックアーキテクチャやスパイキングニューラルネットワークを用いて、人工装具・アンドロイド・生体ユーザとの自然で直感的なインタラクションを可能にする制御フレームワークを開発しています。
また、非侵襲神経インタフェースによる連続的な意図推定や、人間に近い知覚処理を実現する感覚モデルを構築し、アンドロイドのリアルタイム応答性を高めています。さらに、分散型アンドロイドにおける協調行動、共有知覚、スケーラブルな自律性を研究し、将来の支援技術、人間拡張、適応型ヒューマノイドシステムの基盤を築いています。
read more