RESEARCH

Research and Industry-Academia Collaboration
研究・産学連携
N-HuRo: Neuromorphic Humanoid Robotics
Overview
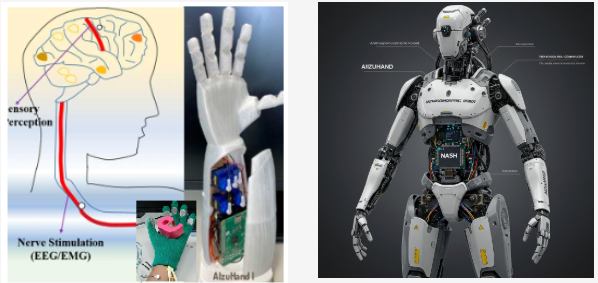
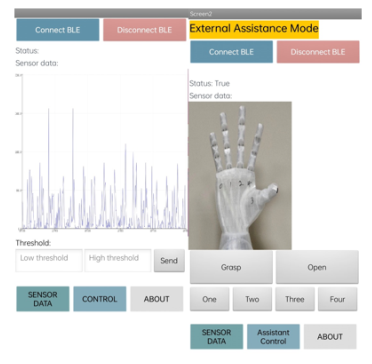
We advance next‑generation adaptive autonomous systems through neuromorphic AI, anthropomorphic prosthetics, and intelligent robotic platforms. Our work integrates neuroscience, AI, neuromorphic computing, and robotics to develop lifelike systems that operate autonomously while adapting to human intent and dynamic environments. Using neuromorphic architectures and spiking neural networks, we design control frameworks enabling natural interaction between artificial limbs, androids, and biological users.
We also develop non‑invasive neural interfaces for continuous intent decoding, and advanced sensory‑processing models that give androids human‑like perception and real‑time responsiveness. Extending these capabilities to distributed anthropomorphic robots, we study multi‑agent coordination, shared perception, and scalable autonomy. This research forms the foundation for future assistive technologies, human augmentation, and adaptive humanoid systems.
read more