教員詳細
FACULTY

Research and Industry-Academia Collaboration
研究・産学連携

ベン アブダラ アブデラゼク BEN ABDALLAH Abderazek
教授、理事(学部・学科長)
- 所属
- コンピュータ理工学科/コンピュータ工学部門
- 職位
- 教授、理事(学部・学科長)
- benab@u-aizu.ac.jp
教育
- 担当科目 - 大学
- - コンピュータアーキテクチャ(学部レベル)、会津大学、2018年~現在
- コンピュータシステム入門(学部レベル)、会津大学、2018年~現在
- 並列コンピュータシステム(学部レベル)、会津大学、2018年~現在
- コンピュータシステム工学、会津大学、2008年~2018年
- 組込みシステム、会津大学、2008年~2016年
- 論理回路設計演習、会津大学、2008年~2016年
- 担当科目 - 大学院
- - ニューロモルフィック・コンピューティング、会津大学、2023年~現在
- 組込みリアルタイムシステム、会津大学、2008年~2022年
- マルチコア・コンピューティング、会津大学、2010年~2015年
- 高度コンピュータ構成論、会津大学、2008年~2023年
研究
- 研究分野
-
計算機システム
- 略歴
- - 1999.4-2002.3 博士(コンピュータ工学)、国立大学法人電気通信大学、東京
- 2002.4-2007.3 研究員、国立大学法人電気通信大学、東京
- 2007.4-2007.9 助教授、国立大学法人電気通信大学、東京
- 2007.10-2011.3 助教授、会津大学
- 2011.4-2012.3 准教授、会津大学
- 2012.4-2014.3 上級准教授、会津大学
- 2014.4-現在 教授、会津大学
- 2014.4-2022.03 コンピュータ工学部門長、会津大学
- 2014.4-現在 教育研究評議会委員、会津大学
- 2022年4月~現在 UoA(会津大学)コンピュータ理工学部 学科長
- 令和4年4月~現在 コンピュータ理工学部長、会津大学
- 令和4年4月~現在 理事、会津大学
- 研究内容キーワード
- 研究は、ニューロモルフィックアーキテクチャ、知的自律システム、エネルギー効率に優れたマルチコア/メニーコアプロセッサなど、先端計算システムを中心に展開されている。特に、知覚・学習・行動を統合し、実世界での知的振る舞いを可能にする次世代プラットフォームの開発に重点を置いている。
- 所属学会
- - フルメンバー(正会員)、Sigma Xi – The Scientific Research Honor Society(2025年クラス)
- シニアメンバー、IEEE/ACM
- 会員、IEEE Computer Society
- 会員、IEEE Systems Council
- 会員、IEEE Circuits and Systems Society(CASS)
- 会員、IEEE CASS Circuits and Systems Education and Outreach(CASEO)技術委員会-
パーソナルデータ
- 学生へのメッセージ
- 会津大学は、好奇心とコンピューティングが結びつき、新たな可能性を生み出す場所です。皆さんには、大胆に探究し、自主的に考え、コンピュータ理工学の力をさらに深めながら協働してほしいと思います。皆さんの創造性と献身は、本学のコミュニティを強くします。ここでのあらゆる機会を活かし、自らを高め続けてください。
主な研究
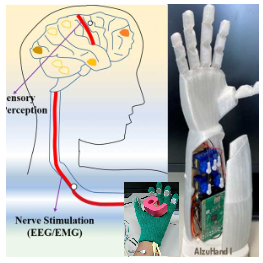
- AIzuHand: リアルタイム・ニューロモルフィック義手
-
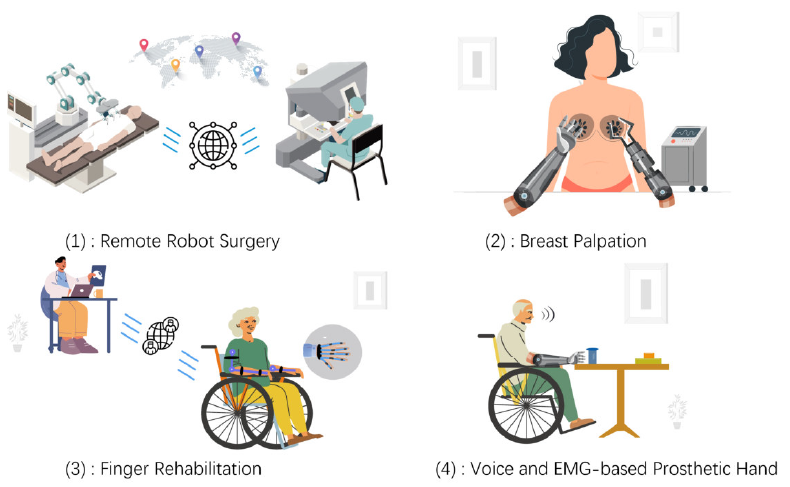
義手・義足などの人工装具は、切断や神経障害をもつ人々の生活の質を大きく向上させる可能性があります。センサー技術やメカトロニクス技術の急速な進展により、これらのデバイスは広く普及する治療的ソリューションとなりつつあります。しかし、複数の感覚入力を統合して複雑なタスクを正確に遂行する生体とは異なり、多くの義肢は単一の感覚入力に依存しており、そのことが精度や使いやすさに影響を与えています。さらに、現在の義肢(腕や脚)の制御方法は、一般に逐次的な制御や大きな電力を必要とする戦略に基づいており、自然な動作が制限され、長く複雑な訓練手順を要するという課題があります。
本プロジェクトでは、感覚統合とフィードバックセンシングを備えた高度なリアルタイム・ニューロモルフィック義手「AIzuHand」を開発します。加えて、キャリブレーション、リアルタイムフィードバック、機能的タスクを支援するユーザーフレンドリーなソフトウェアツールの研究も行います。
...read more
- N-HuRo:ニューロモルフィック・ヒューマノイド・ロボティクス
-
私たちは、神経科学、AI、ニューロモルフィック計算、ロボティクスを統合し、人の意図や動的環境に適応する次世代自律システムの研究を進めています。ニューロモルフィックアーキテクチャやスパイキングニューラルネットワークを用いて、人工装具・アンドロイド・生体ユーザとの自然で直感的なインタラクションを可能にする制御フレームワークを開発しています。
また、非侵襲神経インタフェースによる連続的な意図推定や、人間に近い知覚処理を実現する感覚モデルを構築し、アンドロイドのリアルタイム応答性を高めています。さらに、分散型アンドロイドにおける協調行動、共有知覚、スケーラブルな自律性を研究し、将来の支援技術、人間拡張、適応型ヒューマノイドシステムの基盤を築いています。
read more
- サステナブル・コンピューティング:AI搭載オフグリッド蓄電ソーラーカーポート(インテリジェントエネルギーマネジメント機能)世界初
-
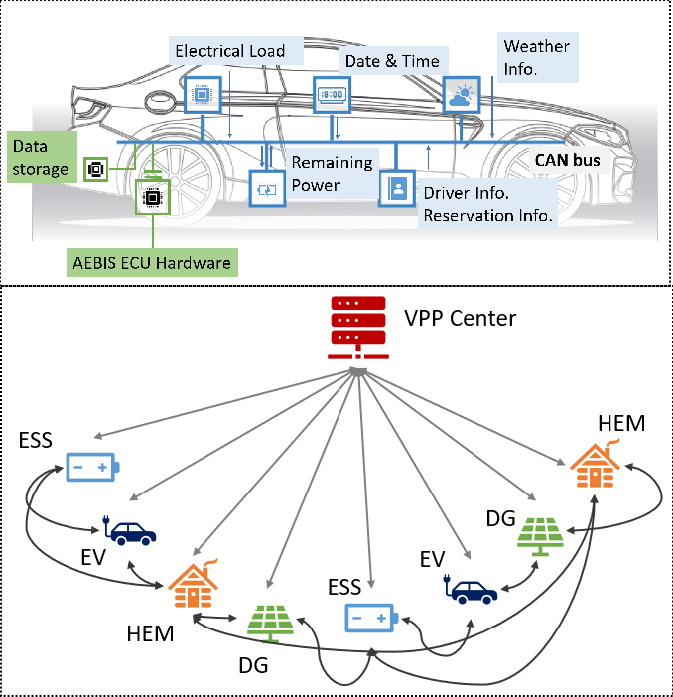
私たちの研究は、エネルギー消費の削減、廃棄物の最小化、持続可能な材料の使用などを含む、環境への影響を最小限に抑えたコンピュータの設計および利用に専念しています。最先端の技術と革新的な方法論を統合することで、コンピュータシステムの効率性と機能を向上させるだけでなく、地球の保護にも貢献するソリューションを開発することを目指しています。私たちの学際的なアプローチは、企業やさまざまな分野の専門家との協力を含んでおり、私たちの発見と実施が実践的で影響力のあるものであることを保証しています。
...read more
- 省エネルギーアーキテクチャ:生体模倣AI SoC からグリーンコンピューティングへ
-
電力とエネルギー効率に優れたコンピューティング システムに関する当社の研究は、より強力で持続可能なテクノロジーに対する高まる需要を満たすために不可欠です。社会がコンピューティング デバイスにますます依存するようになるにつれ、そのエネルギー消費を管理することが非常に重要になります。効率的なコンピューティング システムを開発することで、エネルギー コストを大幅に削減し、環境への影響を最小限に抑え、ポータブル デバイスのバッテリー寿命を延ばすことができます。大規模なデータ センターでは、エネルギー効率を高めることで大幅なコスト削減と二酸化炭素排出量の削減につながります。この分野での当社の取り組みは、ハードウェアとソフトウェアの設計におけるイノベーションを促進し、ユーザーと地球の両方に利益をもたらす、よりスマートで環境に優しいテクノロジーへの道を切り開きます。
...read more
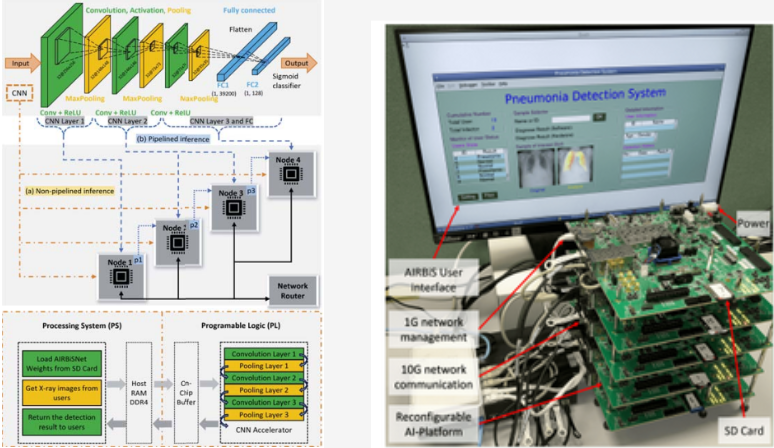
- 脳型・ニューロモルフィック・コンピューティング
-
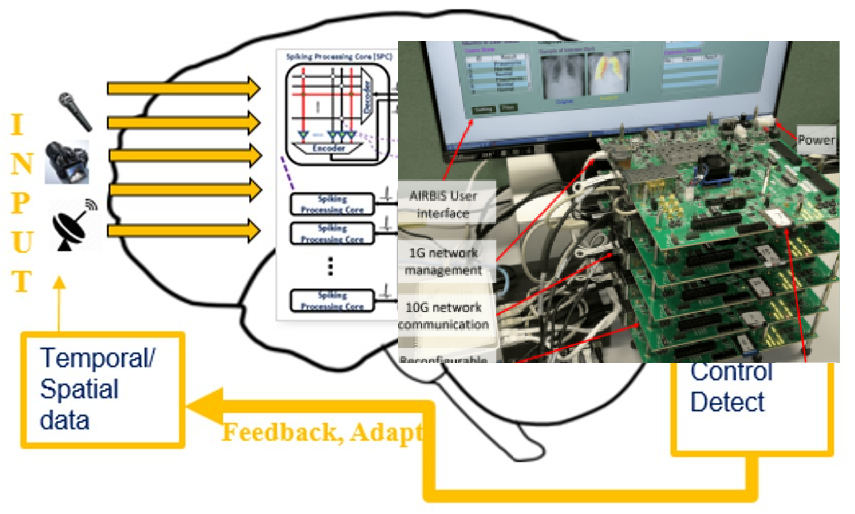
私たちは、以前開発した耐障害性のある三次元オンチップインターコネクト技術を強化した、適応型超低電力ニューロモルフィックチップ (NASH) およびシステムの開発を進めています。NASHシステムは、スパイクの重み、ルーティング、隠れ層、トポロジーなどのさまざまなSNNパラメーターの再構成を可能にする効率的な適応構成方法を備えていることを特徴としています。さらに、このシステムは、さまざまなディープニューラルネットワークトポロジーの混合、効率的な耐障害性マルチキャストスパイクルーティングアルゴリズム、および効果的なオンチップ学習メカニズムを組み込んでいます。NASHシステムのパフォーマンスを実証するために、FPGA実装を開発し、VLSI実装も確立します。NASHの最終目標は、脳にインスパイアされた処理技術を小規模な埋め込み型センサーやセンサーベースのデバイス(BCI(EEG/EMG)、オーディオ、プレゼンス検出、アクティビティ認識など)に導入することです。
...read more
主な著書・論文
主な研究業績の一覧については、以下のページをご参照ください。
https://web-ext.u-aizu.ac.jp/misc/neuro-eng/major-pub.html