教員詳細
FACULTY

Research and Industry-Academia Collaboration
研究・産学連携

成瀬 継太郎 NARUSE Keitaro
教授、情報システム学部門長
- 所属
- コンピュータ理工学科/情報システム学部門
- 職位
- 教授、情報システム学部門長
- naruse@u-aizu.ac.jp
教育
- 担当科目 - 大学
- ロボット工学と自動制御,コンピュータシステム概論,プログラミングC++,画像処理学
- 担当科目 - 大学院
- Modern Control Theory, Advanced Robotics, Theory of Evolving Networks
研究
- 研究分野
-
宇宙惑星科学
知能ロボティクス
ロボット工学
- 略歴
- 1995年北海道大学大学院・工学研究科修了,博士(工学) 1995-98年米国ニュージャージ工業大学でポストドクター研究員 1998-2004年北海道大学大学院・情報科学研究科・助手 2004年-会津大学に講師で着任.2013年から上級准教授
- 現在の研究課題
- 群ロボットの制御と自己位置推定,軟弱地盤用移動機構,農業用ロボットへの応用
- 研究内容キーワード
- 群ロボット
- 所属学会
- 日本ロボット学会,計測制御学会,精密工学会
パーソナルデータ
- 趣味
- ジョギング
- 子供時代の夢
- 心理歴史学者:アイザック・アシモフのSF小説『ファウンデーション』に登場する架空の学問。膨大な数の人間集団の行動を予測する数学的手法。そのような学問は実在しないが、社会の未来を予測に興味があった
- これからの目標
- ロボット工学を通じた地域貢献。福島県をロボット技術の集積地にすること
- 座右の銘
- じぶんが動けば、なにかが変えられる
- 愛読書
- ホフスタッター『ゲーデル・エッシャー・バッハ』。著者はMITの人工知能研究者。自己言及性をキーに知能について考察している
- 学生へのメッセージ
- 何であれ、一千時間努力したら素人から卒業できる、一万時間努力したら玄人になれる、らしいですよ。一日4時間を年間250日で一千時間、10年で一万時間です。卒論に一千時間費やせたら立派ですね
{kind=link}
主な研究
- 小惑星探査機「はやぶさ2」
-
JAXAが2014年に打ち上げた小惑星探査機「はやぶさ2」プロジェクトに会津大学からCAIST/ARC-Space所属教員を中心に多くのメンバーが参加し,2018年の小惑星Ryugu(リュウグウ)到着と,2020年の地球帰還を目指して,研究を進めています.特に,「はやぶさ2」に搭載されている近赤外線分光装置を始めとする観測機器の開発や,観測機器が取得するデータを元に小惑星形状のモデリング等を行う解析ソフトウェアの開発に取り組んでいます.
JAXAはやぶさ2プロジェクトサイト
*バナー画像などはJAXAデジタルアーカイブスのデータを利用しています
- 初心者や子供でも使いやすいロボット・CGキャラクタの動作生成
-
〇背景
• 家庭用ロボットは普及し始めているが、まだまだ動かすためのプログラミングが難しい
• PCやCG環境は発達しているが、自分でアニメーションを作るのは大変だ
• もっと簡単に、手軽にロボットを動かしたい、アニメを作りたい!
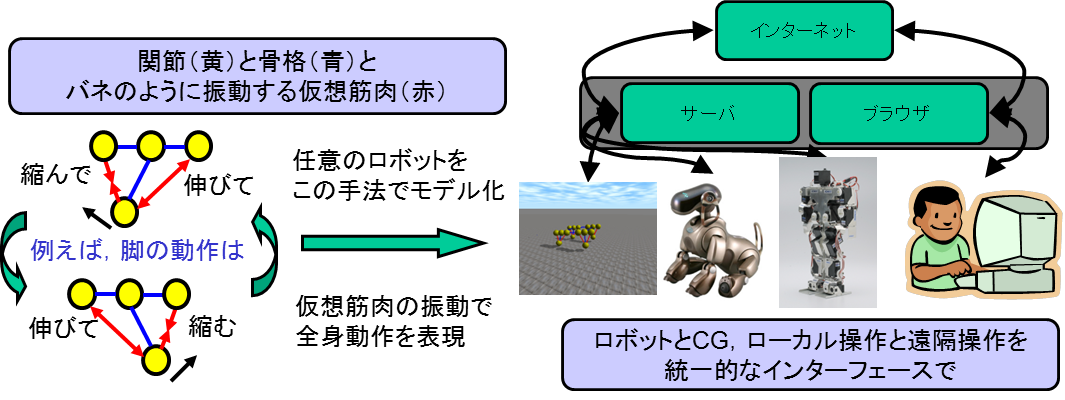
〇目的: Connect-and-Play
• ロボットを買ってきてPCにつなぐだけで(Connect)、 すぐに使える(Play)
• インターネットを使うような簡単な操作で
• 専門知識を必要とせずに
• シミュレーションも実環境もロボットもCGも同じ操作感で
〇3つの特徴
• 仮想筋肉振動法による動作の表現
もっと直感的で、もっと生物らしい自然な動作の表現を可能に
• PCとの対話による半自動のプログラム生成
「リアルな」「それらしい」動作を簡単に実現可能に
• Webサービスとミドルウェア
既存のPCやインターネット環境を利用して安価に、手軽に導入可能に
- 月火星箱庭構想
-
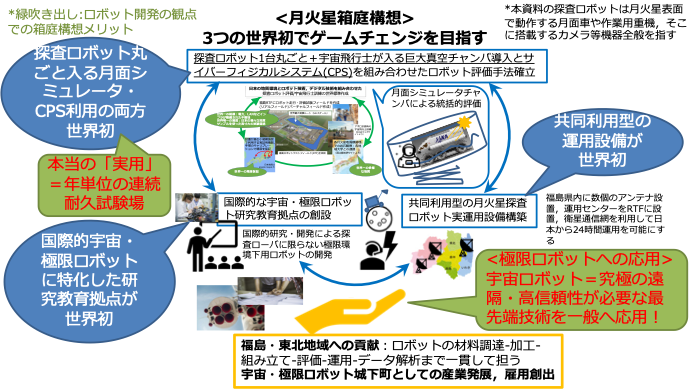
月火星箱庭構想で作成を目指すロボット評価施設は,大きく3つ.1つはリアル&バーチャル箱庭(ロボット走行路&リアル空間を再現したシミュレータ内の走行路),2つ目は月火星表面を模擬可能なシミュレータチャンバ(低圧環境,表面土壌等を模擬),3つ目は共同利用可能な月火星探査ロボット運用設備(アンテナ等).
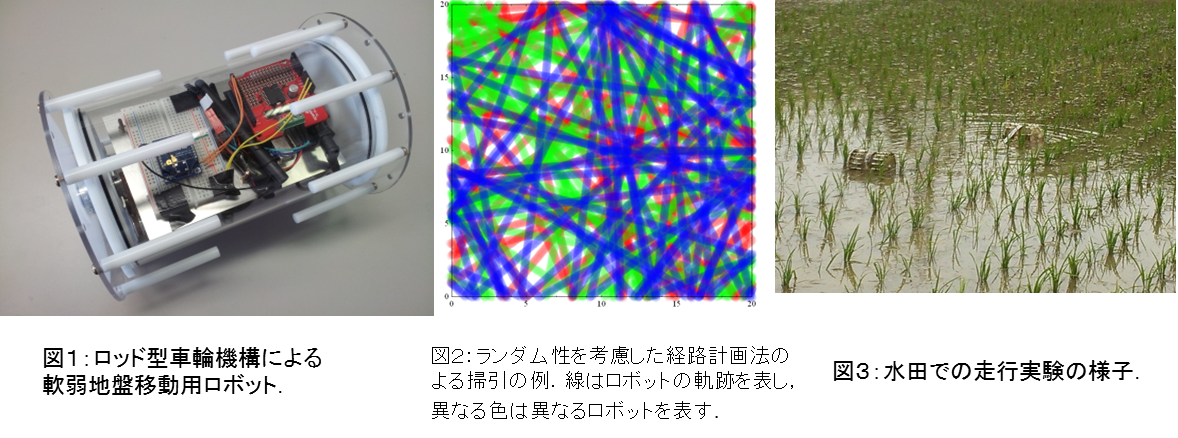
- 軟弱地盤用移動ロボット
-
〇技術の背景
水田に代表されるように、水を含んだ土はとても柔らかく、車輪の回転によって土壌が変形し、簡単にスリップしてしまう。これを軟弱地盤と呼ぶ。
農業への応用を考えると、土壌を破壊せずに移動する機構が望まれる。
〇技術の概要
そのために、車輪の接地面積を減らすことにより車輪が土壌にあたえる力を低減させ、土壌の破壊を防ぎながら軟弱地盤での移動を可能にするロッド型車輪機構を開発した。
一方、土壌は各地点で傾斜や軟弱度が異なるため、直進のような正確な移動は困難である。しかし作業のためには、与えられた区間を隅々まで移動(=掃引)しなければならない。
そのために移動のランダム性を考慮したロボットの経路計画方法を開発した。
〇技術の応用性
干潟や砂地、月面も軟弱地盤であるため、多くの屋外作業ロボットへの応用が期待される。
主な著書・論文
Keitaro Naruse, "Neighbor Topology for Dynamic Plane Coverage in Swarm Leading Control," International Journal of Artificial Life Research, vol. 3, no. 1, pp. 59-75, 2012