Simulation of Natural Phenomena
 Simulation of multi-agent objects inspired by Ants Behavior
Ant colonies attracted scientists because of their ability to collectively achieve
complex tasks through self-organization processes based on simple rules. It is
believed that such collectively technique is the main reason for the survival of
such small insects through millions of years on earth despite the drastic
changes in environment and living conditions through history. Imitating this
behavior, computer scientists and engineers are interested in building ants-like
agents (e.g. ants-robots) that has limited sensing and computational
capabilities, but are simple to design, easy to program, and cheap to build.
This makes it feasible to deploy groups of such agents, in places inaccessible
otherwise, and take advantage of the resulting fault tolerance, parallelism, and
collectively achievement of a certain goal. One of the most interesting ants
behaviors is the highly optimized path that ants follow, in their foraging,
between the source of food and the colony's nest. The ants decision is
controlled by imitating and following of trails of a chemical substance, called
pheromone. When there is a choice among several alternative paths, ants
choose a path in a probabilistic way, based on the pheromone concentration over
the possible paths. This mechanism allows the selection of the shortest path
among several ones. Hence, the pheromone concentration on those paths
increase more rapidly and they attract more ants. This process of indirect
communication relies on a positive feedback mechanism and depends on the
environment characteristics, e.g. colony size, food type, number of
food sources and the nature of the environment on which the ants are moving.
Such optimized behavior inspired several applications, for example:
traveling salesman problem, the quadratic assignment problem, the job
shop scheduling problem, the graph coloring problem, the vehicle routing
problem, and network routing algorithm with digital pheromone which
used by British Telecommunications PLC in London to solve routing problem and to
find the shortest path.
Simulation of multi-agent objects inspired by Ants Behavior
Ant colonies attracted scientists because of their ability to collectively achieve
complex tasks through self-organization processes based on simple rules. It is
believed that such collectively technique is the main reason for the survival of
such small insects through millions of years on earth despite the drastic
changes in environment and living conditions through history. Imitating this
behavior, computer scientists and engineers are interested in building ants-like
agents (e.g. ants-robots) that has limited sensing and computational
capabilities, but are simple to design, easy to program, and cheap to build.
This makes it feasible to deploy groups of such agents, in places inaccessible
otherwise, and take advantage of the resulting fault tolerance, parallelism, and
collectively achievement of a certain goal. One of the most interesting ants
behaviors is the highly optimized path that ants follow, in their foraging,
between the source of food and the colony's nest. The ants decision is
controlled by imitating and following of trails of a chemical substance, called
pheromone. When there is a choice among several alternative paths, ants
choose a path in a probabilistic way, based on the pheromone concentration over
the possible paths. This mechanism allows the selection of the shortest path
among several ones. Hence, the pheromone concentration on those paths
increase more rapidly and they attract more ants. This process of indirect
communication relies on a positive feedback mechanism and depends on the
environment characteristics, e.g. colony size, food type, number of
food sources and the nature of the environment on which the ants are moving.
Such optimized behavior inspired several applications, for example:
traveling salesman problem, the quadratic assignment problem, the job
shop scheduling problem, the graph coloring problem, the vehicle routing
problem, and network routing algorithm with digital pheromone which
used by British Telecommunications PLC in London to solve routing problem and to
find the shortest path.

2. Single Ant move at random
How Real Ants Behave?
Simulation of multi-agent objects inspired by Ants Behavior
3. Communication
Simulation of multi-agent objects inspired by Ants Behavior
How Real Ants Behave?
Ants communicate by pheromone
4. Group cooperation for achieving goals
Simulation of multi-agent objects inspired by Ants Behavior
How Real Ants Behave?
1. Complex problems could be solved by cooperative simple tasks
2. Shortest path: from food to colony
Solving difficult (NP) optimization problems:
a. Traveling Salesman problem
b. Network routing problem
c. Graph coloring problem
d. Distributed work (Robotics)
Simulation of multi-agent objects inspired by Ants Behavior
What can we learn?
A
max
> A
t
?
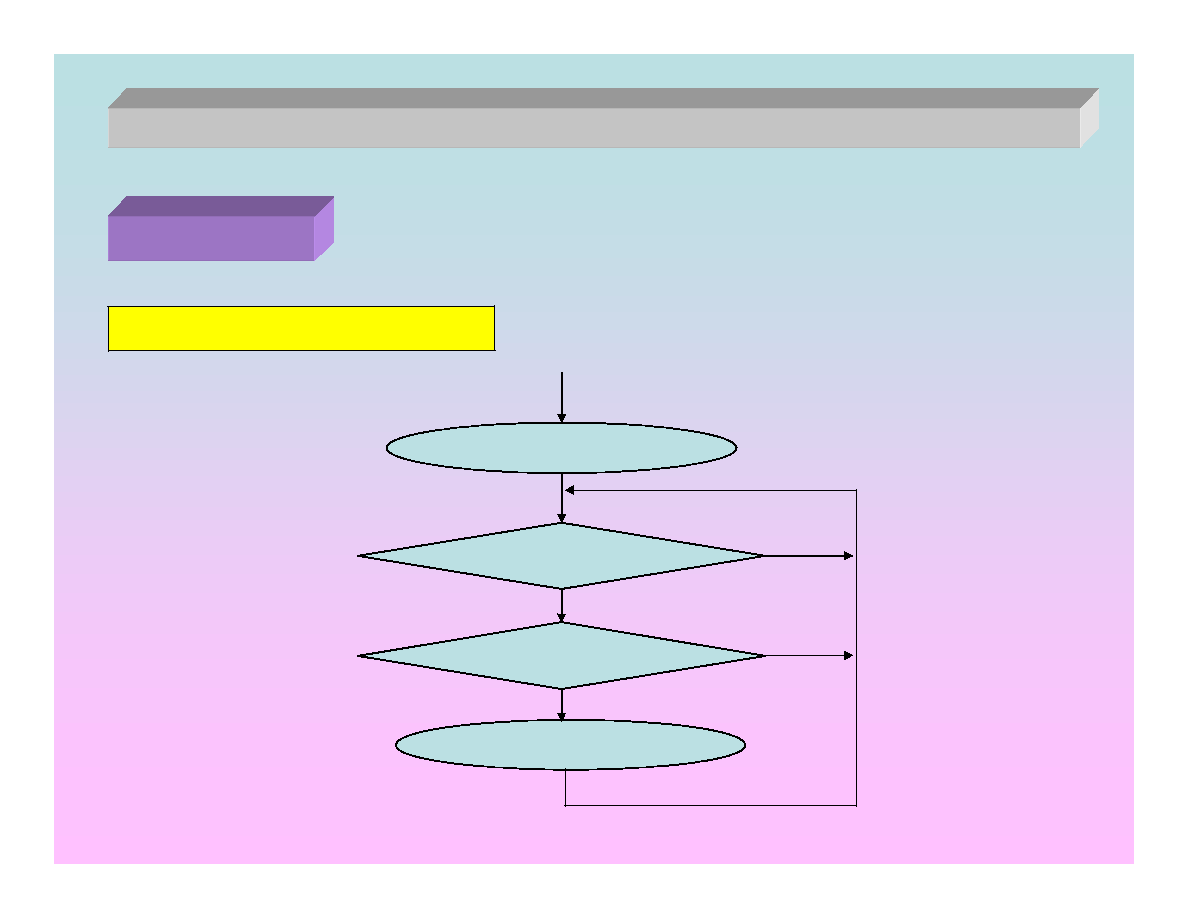
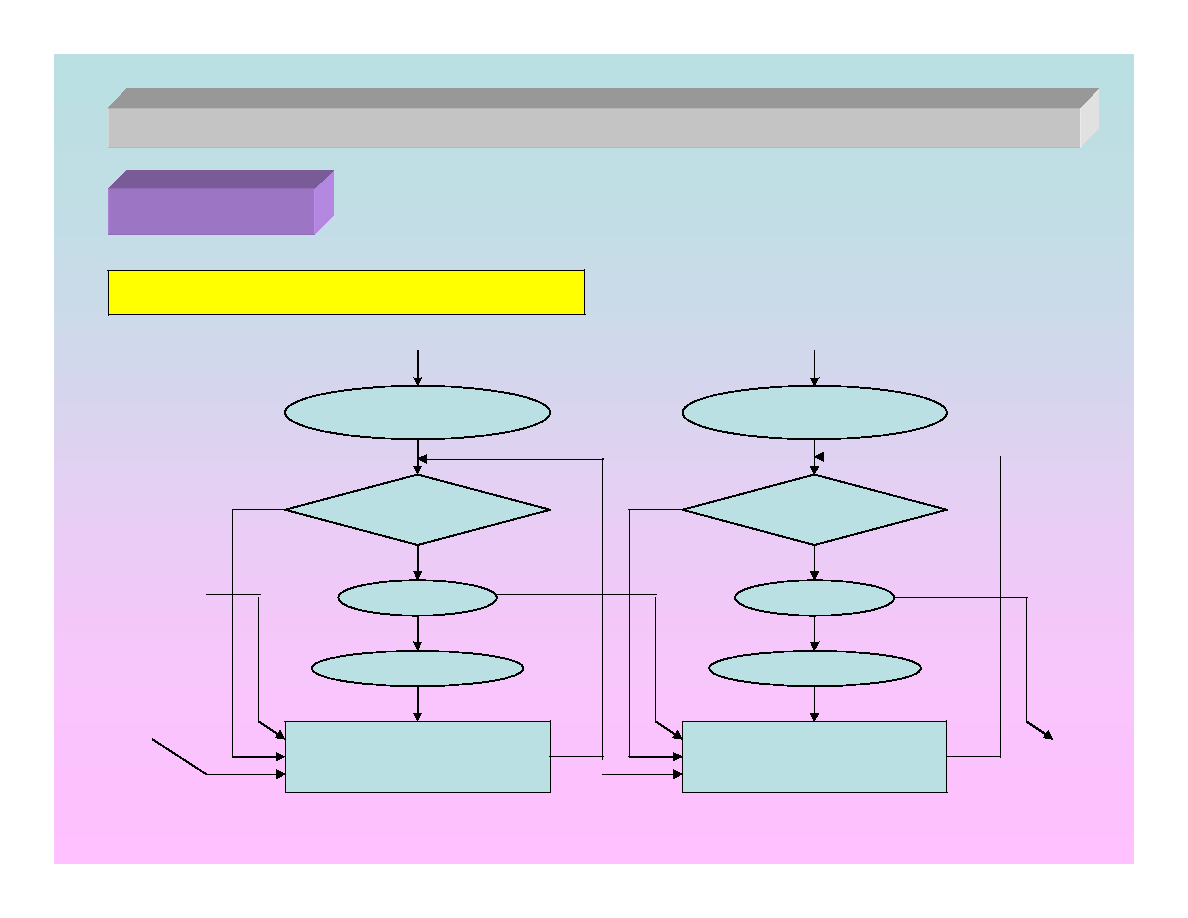
1. Ants Birth-Death Process
Initialize: Colony
Enough food?
Create Ant
No
No
Simulation of multi-agent objects inspired by Ants Behavior
The Model
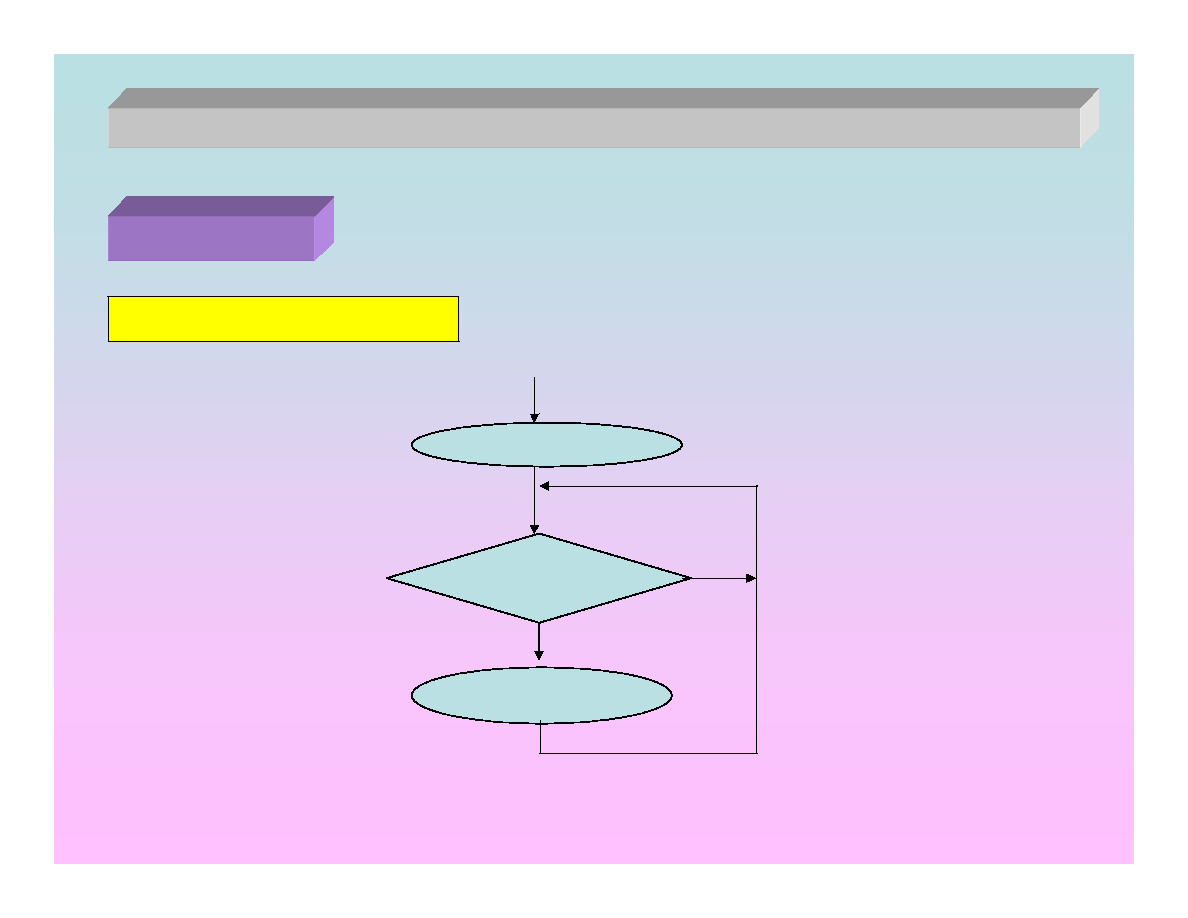
2. Food Creation Process
Initialize: Food
F
max
> F
t
?
Create Food
No
Simulation of multi-agent objects inspired by Ants Behavior
The Model
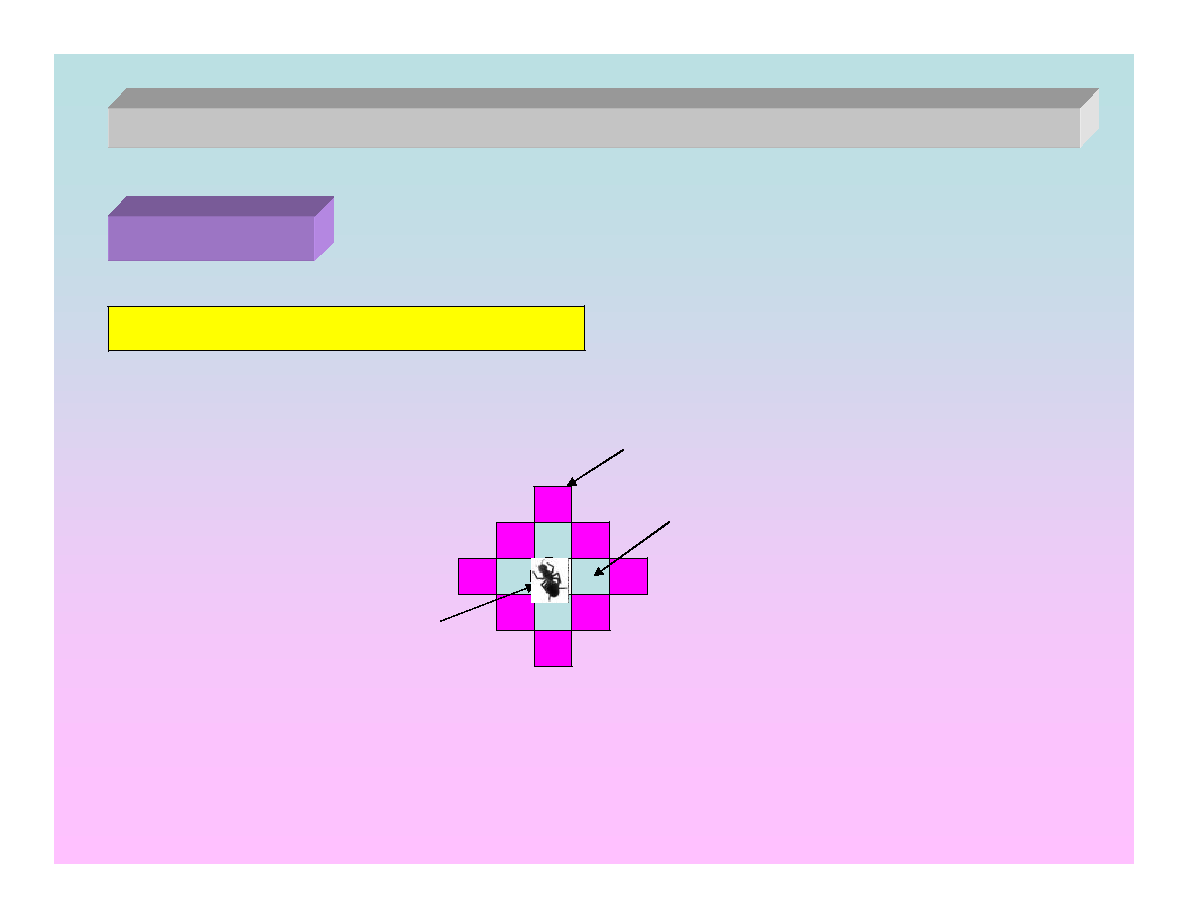
3. Ant, Food, Pheromone positions
Pheromone
Simulation of multi-agent objects inspired by Ants Behavior
The Model
Possible food
Ant




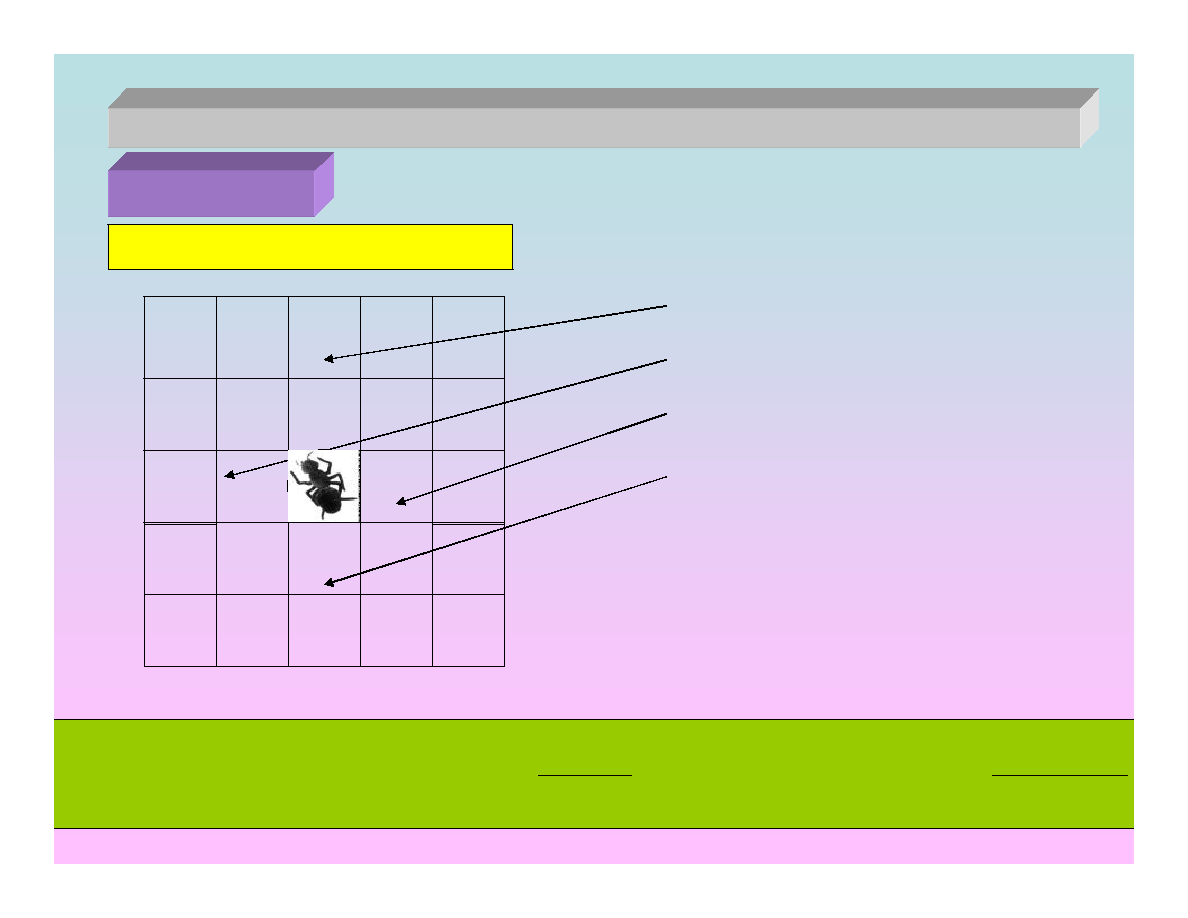
Upper Part
Left Part
Right Part
Down Part
4. Pheromone feeling
100
)
(
100
%
%
1
,
,
neighbor
Direction
own
t
y
x
t
y
x
D
Pheromone
D
Pheromone
Pheromone
+
=
-
Simulation of multi-agent objects inspired by Ants Behavior
The Model
5. Pheromone Spread Relationship
Initialize: pos
pherm > 0?
Spread
Decrease
Calculate new pherm
No
Initialize: pos
pherm > 0?
Spread
Decrease
Calculate new pherm
No
To Position
From Position
From Ant
Simulation of multi-agent objects inspired by Ants Behavior
The Model
6. Ants Actions
At any position: ants move forward, turn right, turn left, pick food or rest
At colony: ants put food or rest
If far from colony ants must back to colony
Ants always spread pheromone
Simulation of multi-agent objects inspired by Ants Behavior
The Model
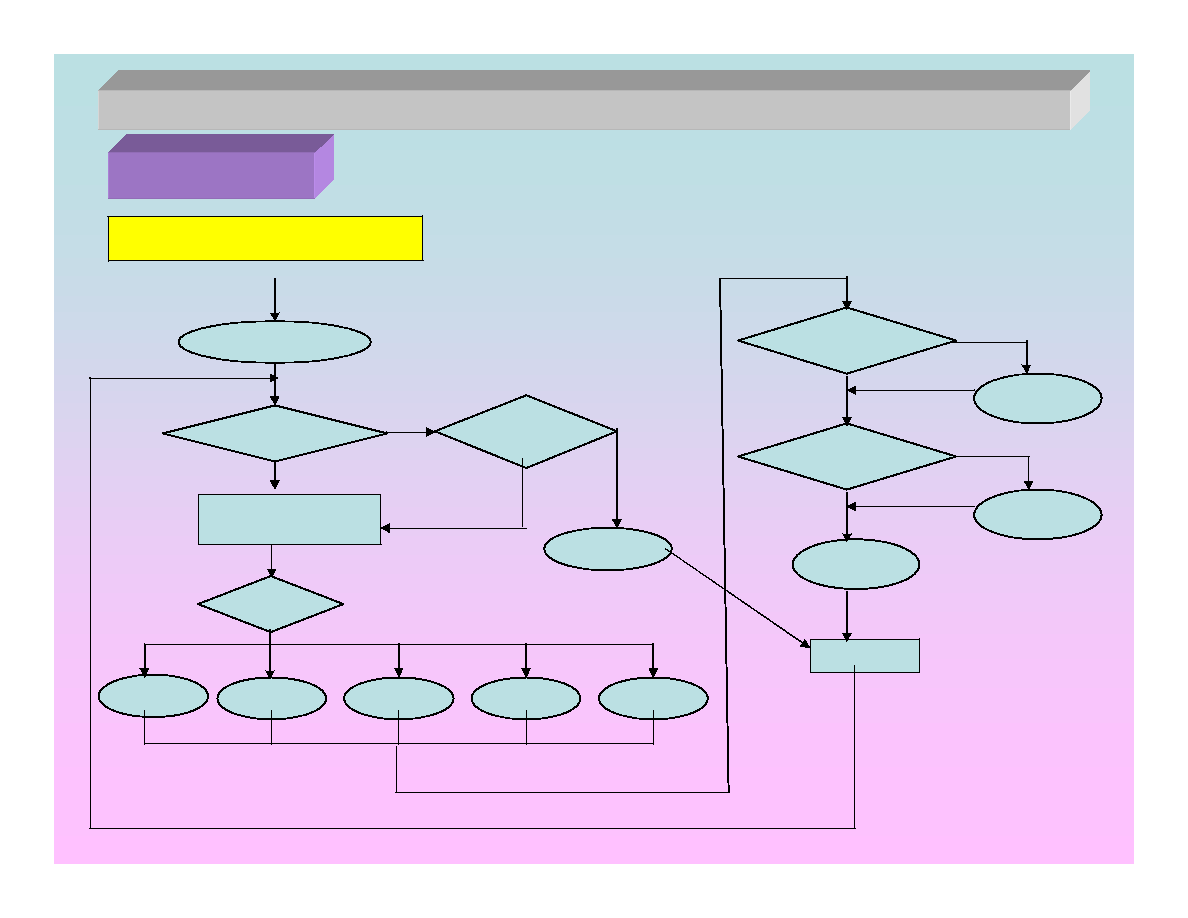
8. Ants behavior chart
Initialize: Ant
In Colony?
P(X)=?
Move
Turn/R
Turn/L
Rest
Pick
Have food?
Put food
Yes
Yes
Yes
Food found?
Have food?
Spread ph
Spread pr
Spread ph
Decre. Life
Yes
Simulation of multi-agent objects inspired by Ants Behavior
The Model
Calculate: Pheromone,
Food, and Probability
No
No
No
No
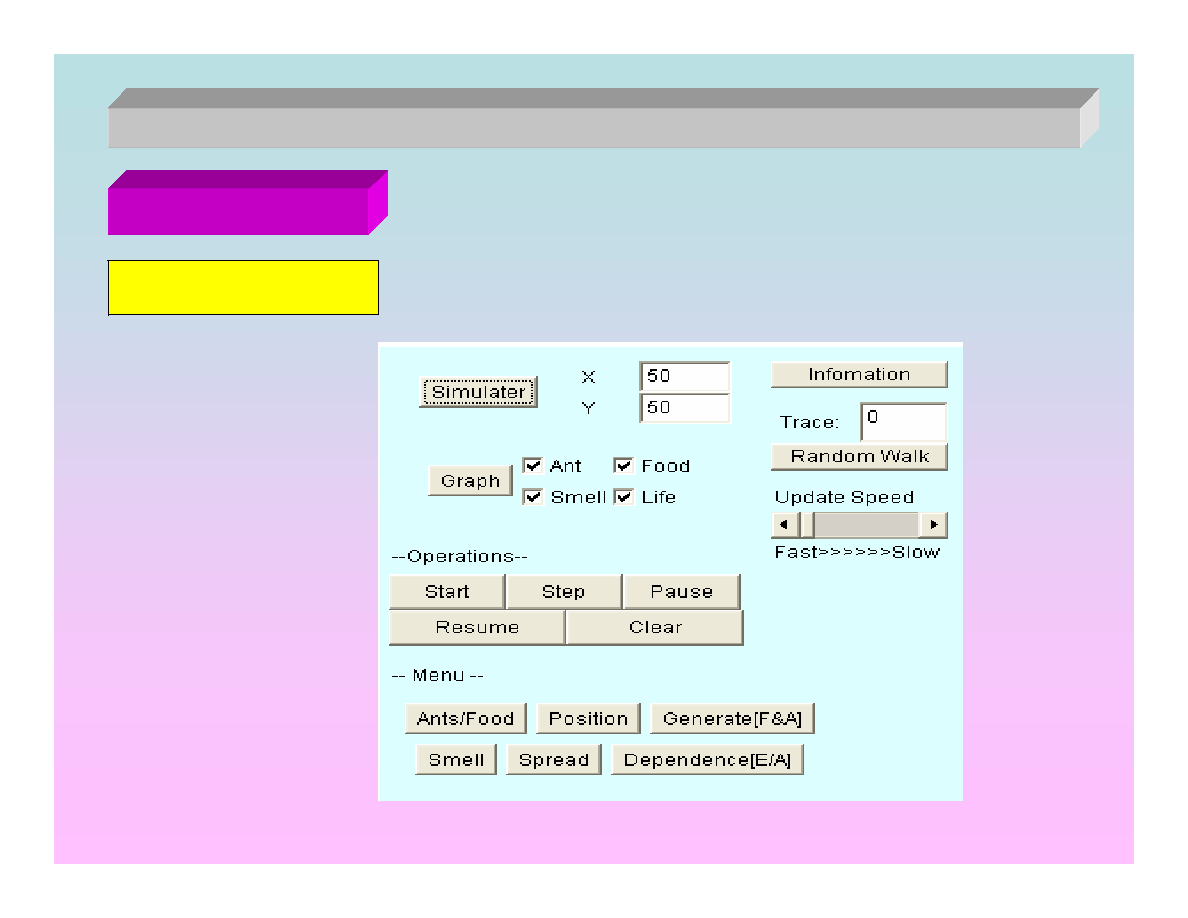
1. Control Panel
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
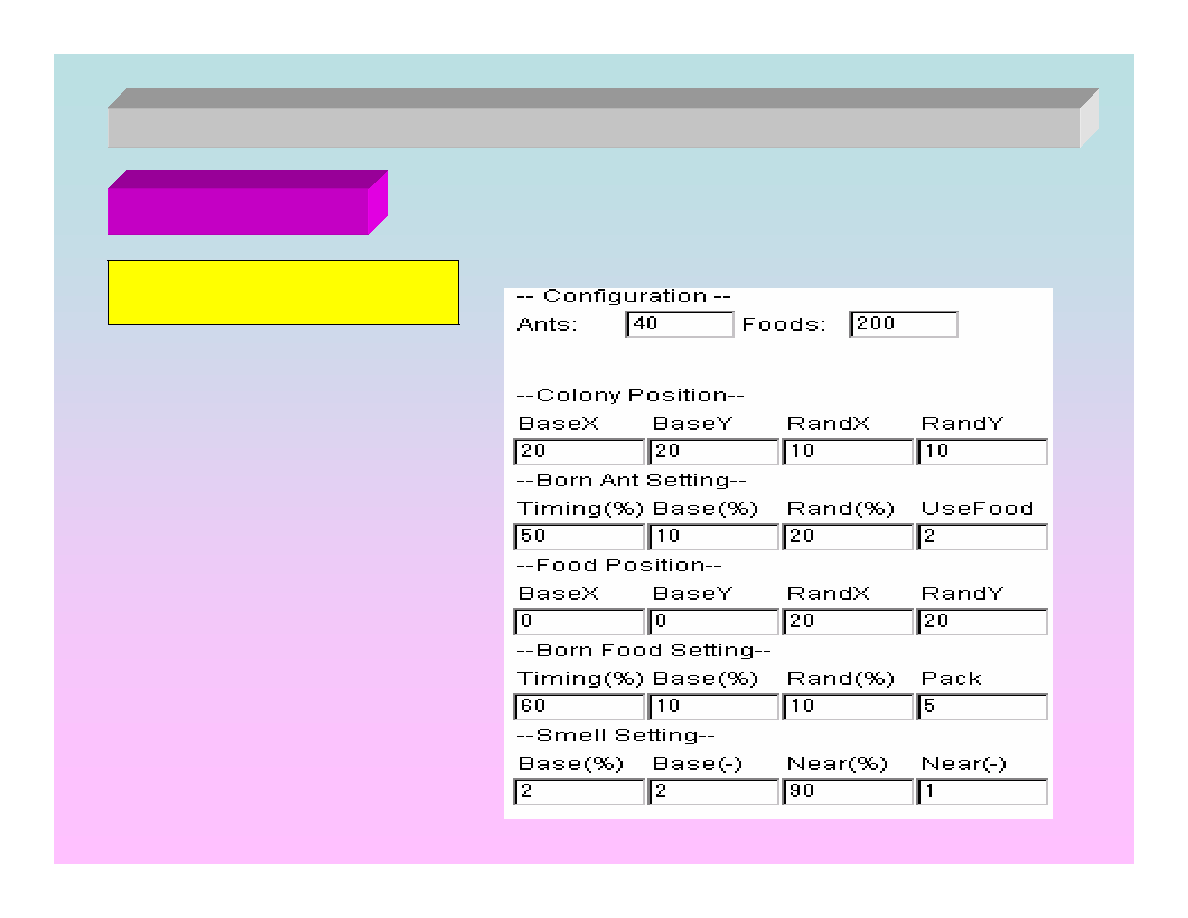
2. System Initialization
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
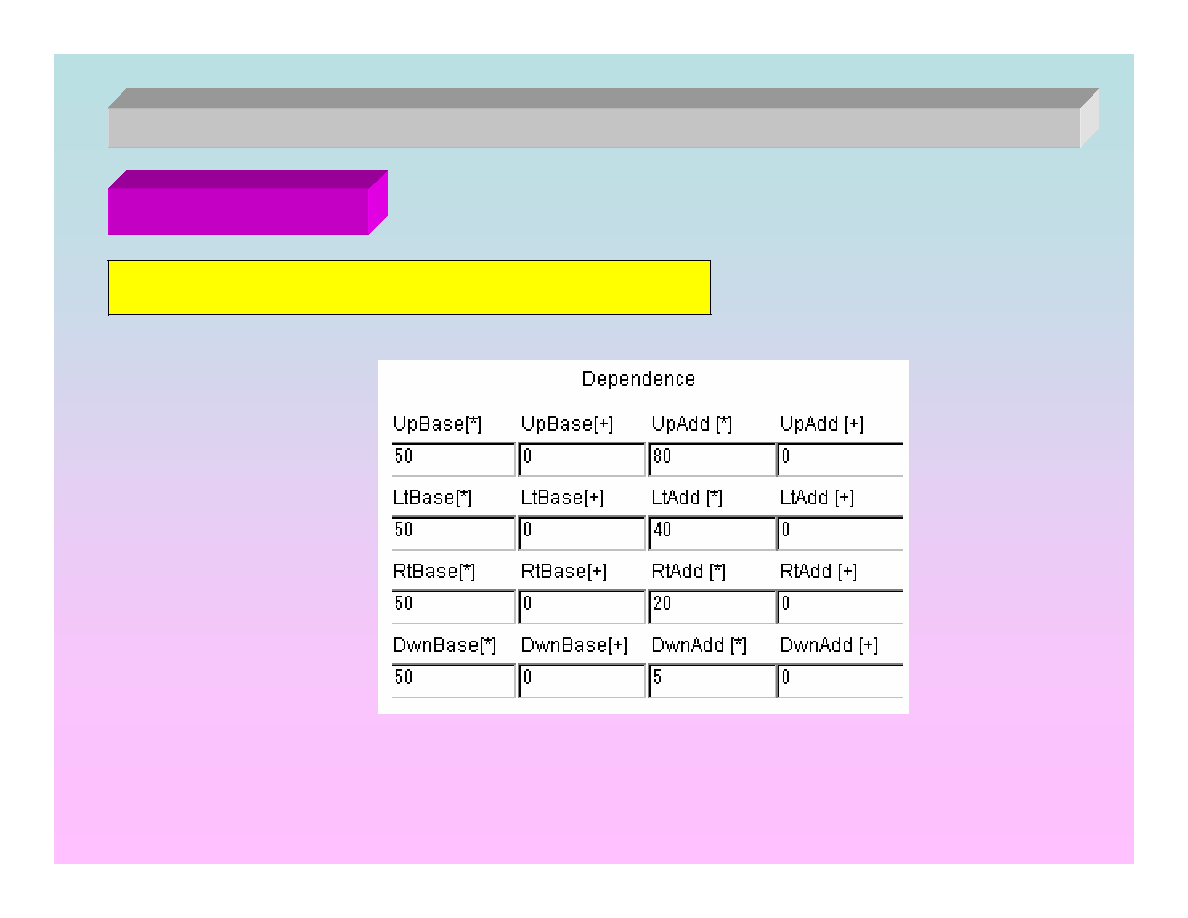
3. Pheromone Dependency Initialization
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
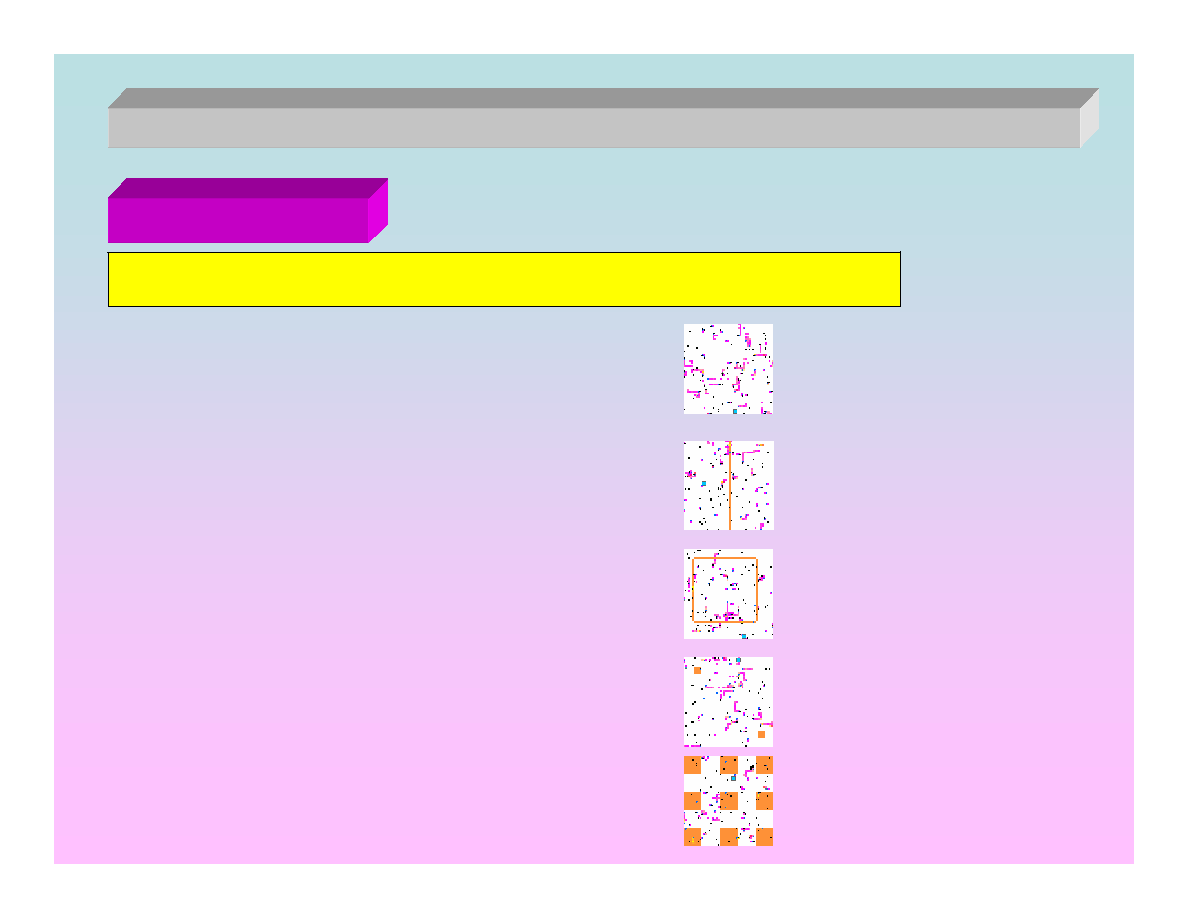
4. Environment Pheromone Condition Initialization
Squared Environment Condition
Normal Environment Condition
Framed Environment Condition
Simple 2-Squared Environment Condition
Lined Environment Condition
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
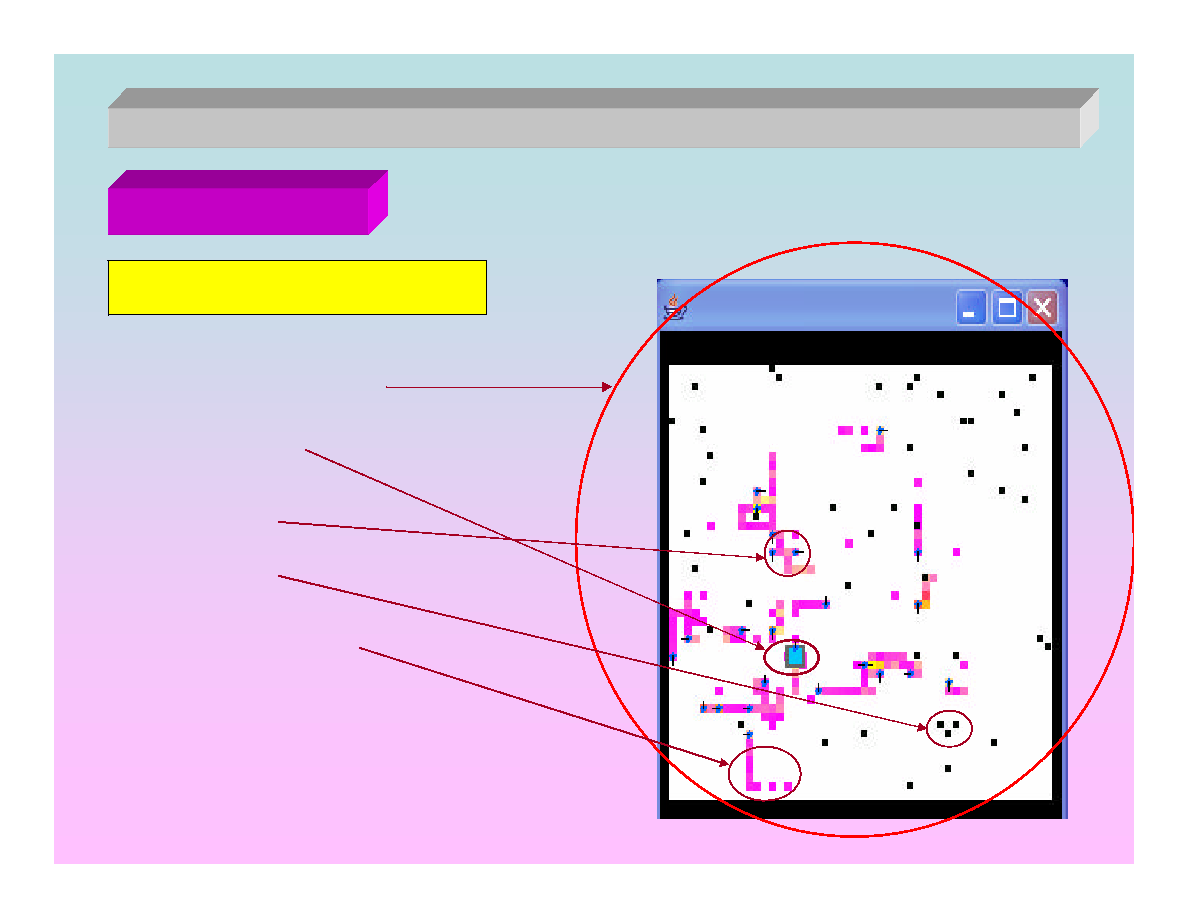
5. System Components
c. Ants
d. Food
a. Environment
b. Colony
e. Pheromone
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
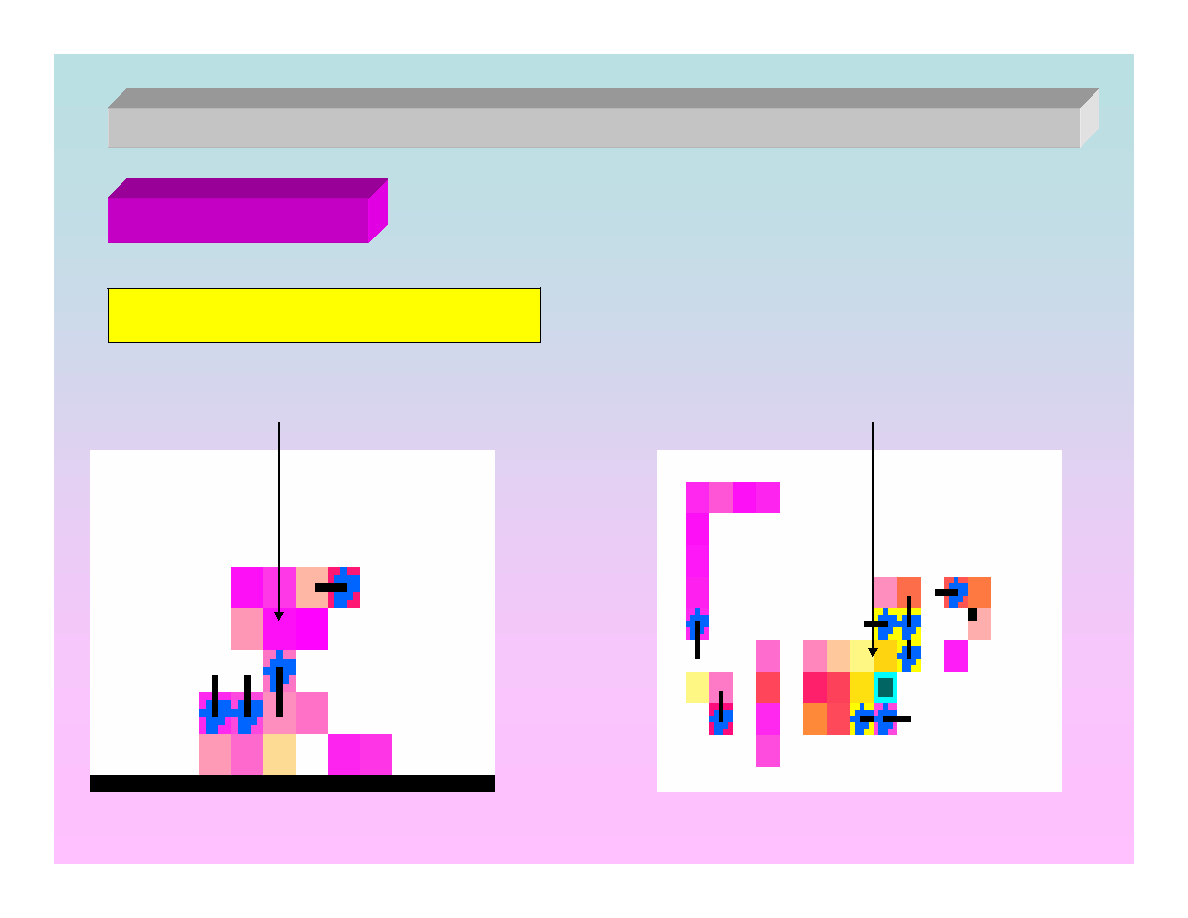
6. Ants Grouping Property
Strong pheromone area
Colony area
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
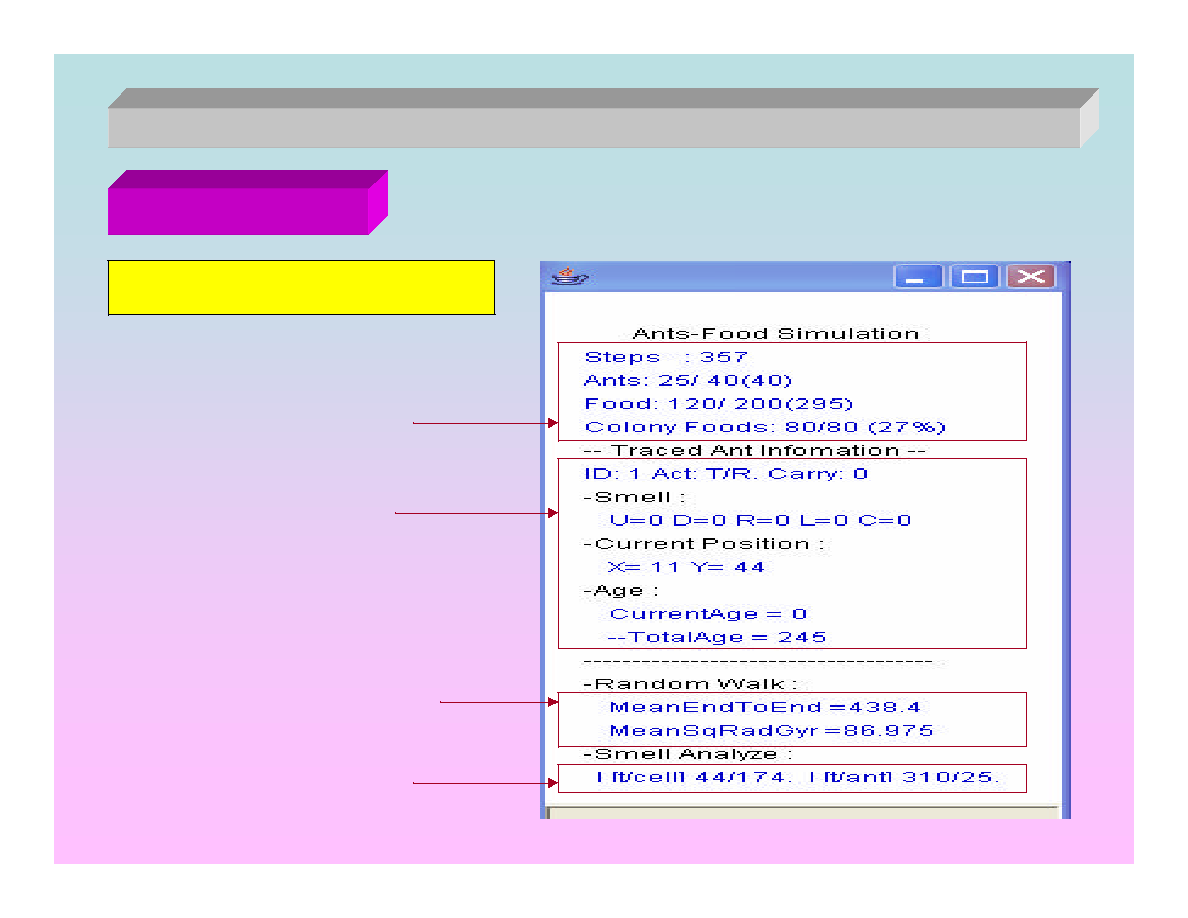
7. Simulation Information
Environment Information
Traced Ant Information
Pheromone Information
Random Walk Information
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
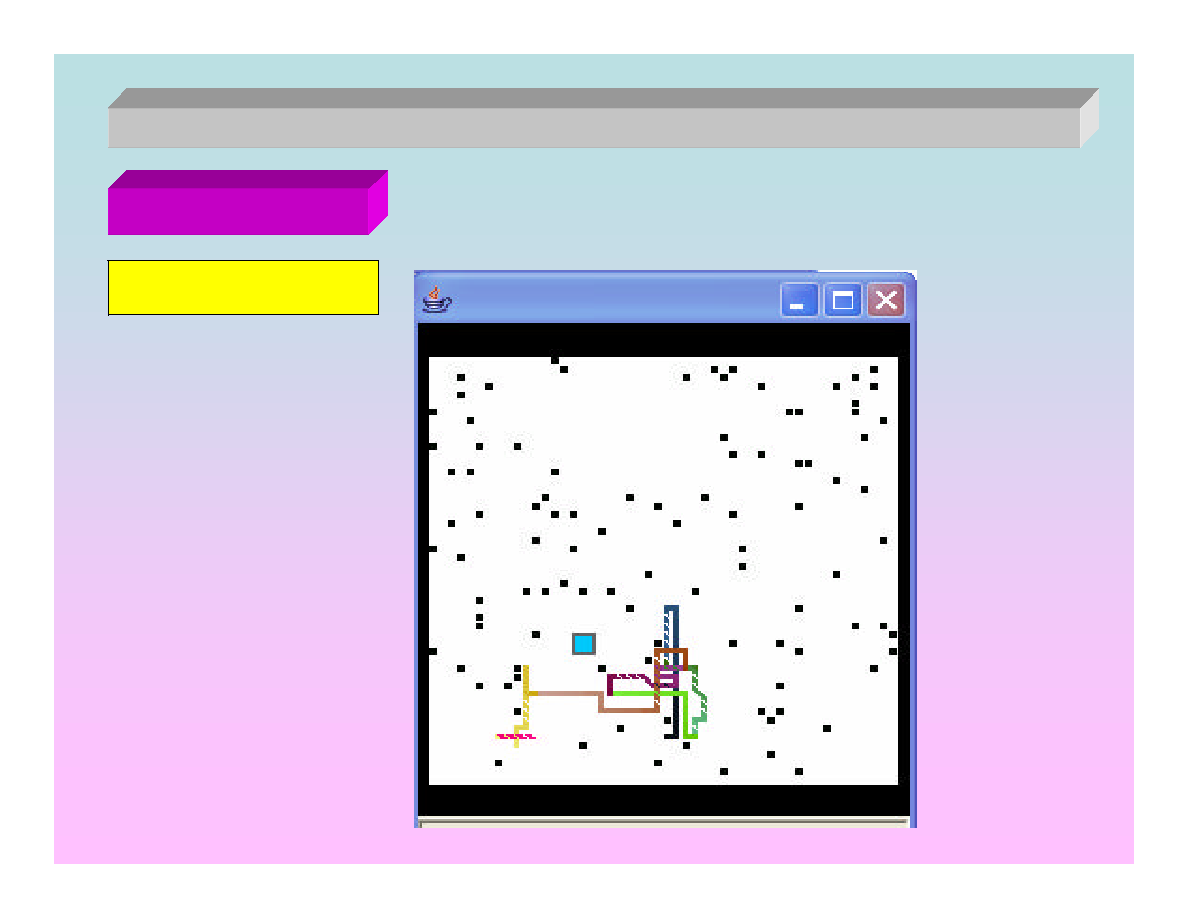
8. Random Walk
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
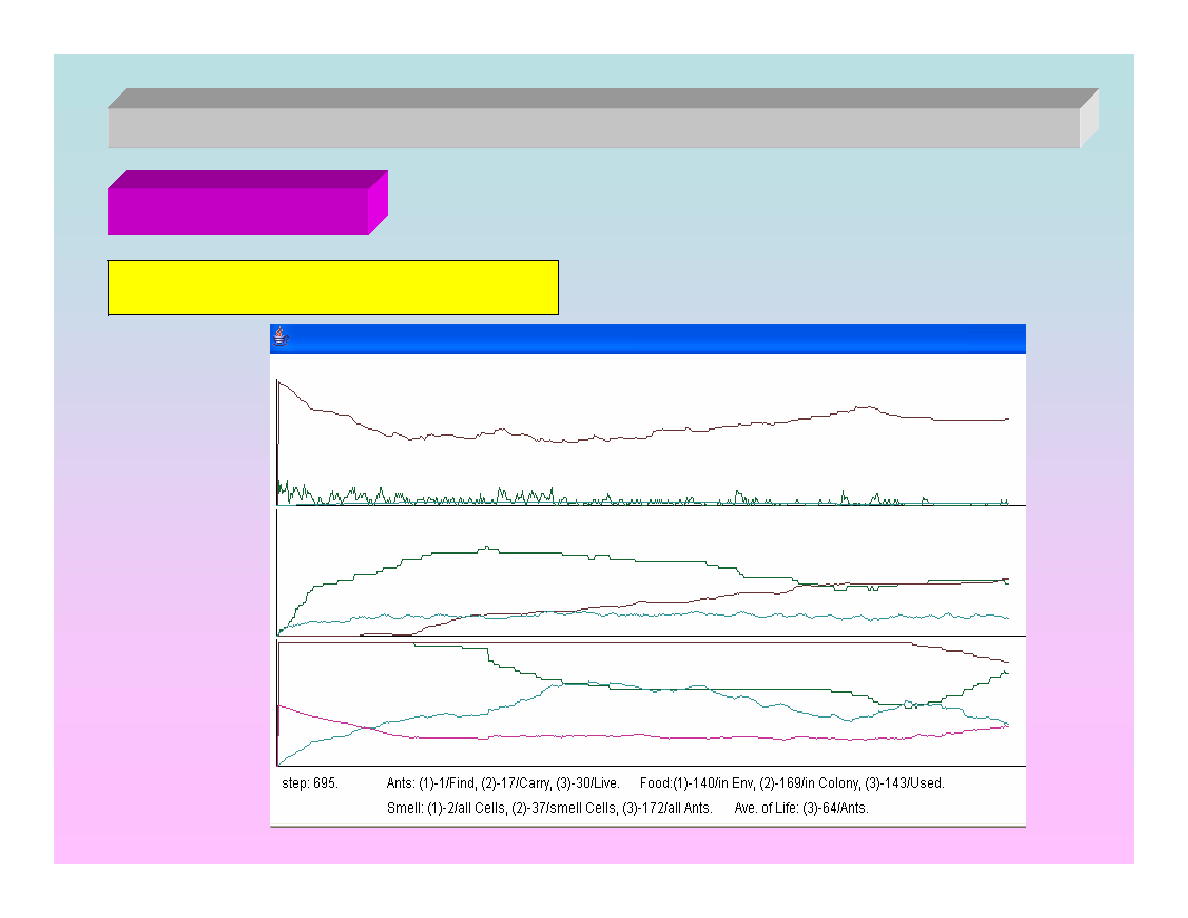
9. Graphical Representation
Simulation of multi-agent objects inspired by Ants Behavior
The Simulation
1. Vehicle Routing Problem (VRP)
VRP is a distribution problem in which trucks are based at
a warehouse (depot) and are required to visit a set of
customers. Each customer has a demand and a geographic
location. The objective is to minimize the total distance
traveled by all trucks. The sum of demands of customers
served by a truck cannot exceed the truck capacity. The
demand of a customer cannot be split among two or more
trucks.
Simulation of multi-agent objects inspired by Ants Behavior
Application
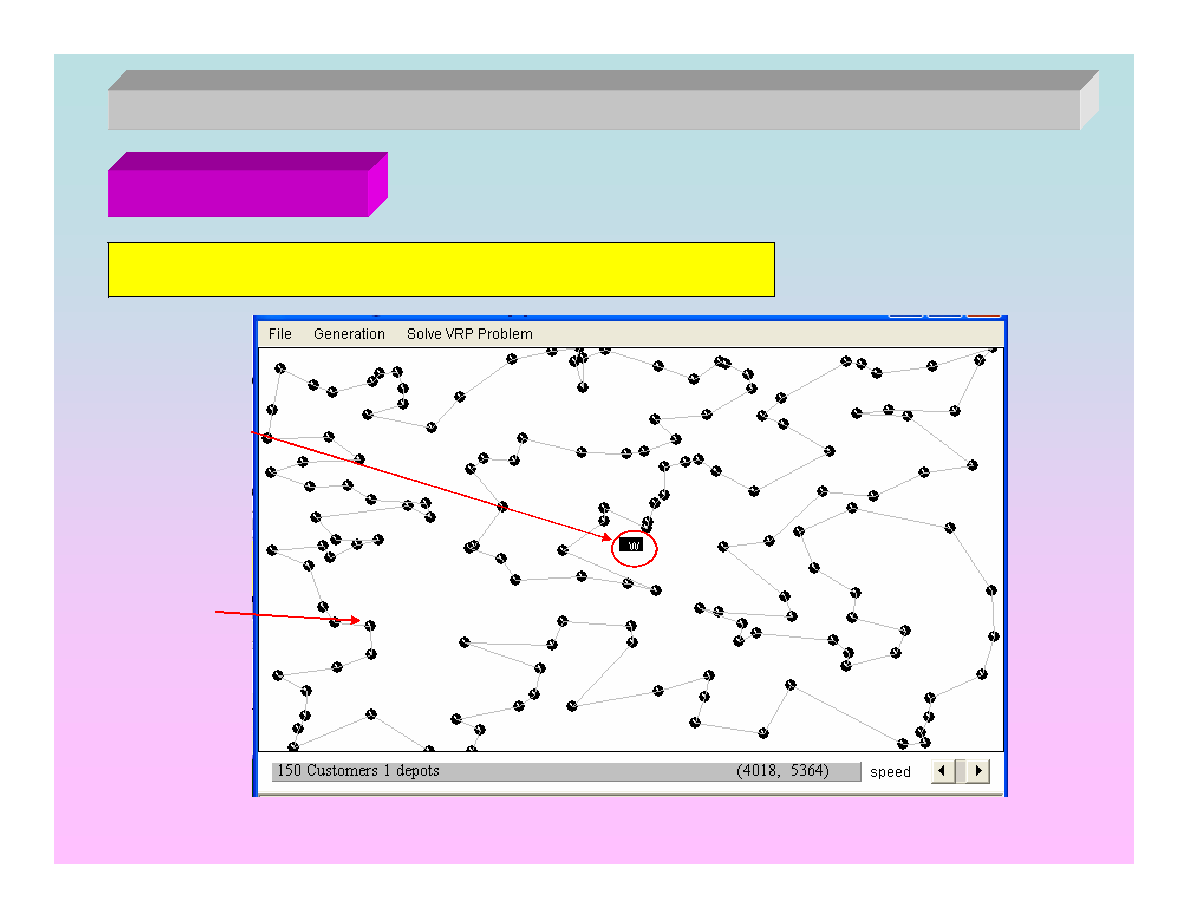
2. VRP Simulation: initialization
Warehouse
Customers
Simulation of multi-agent objects inspired by Ants Behavior
Application
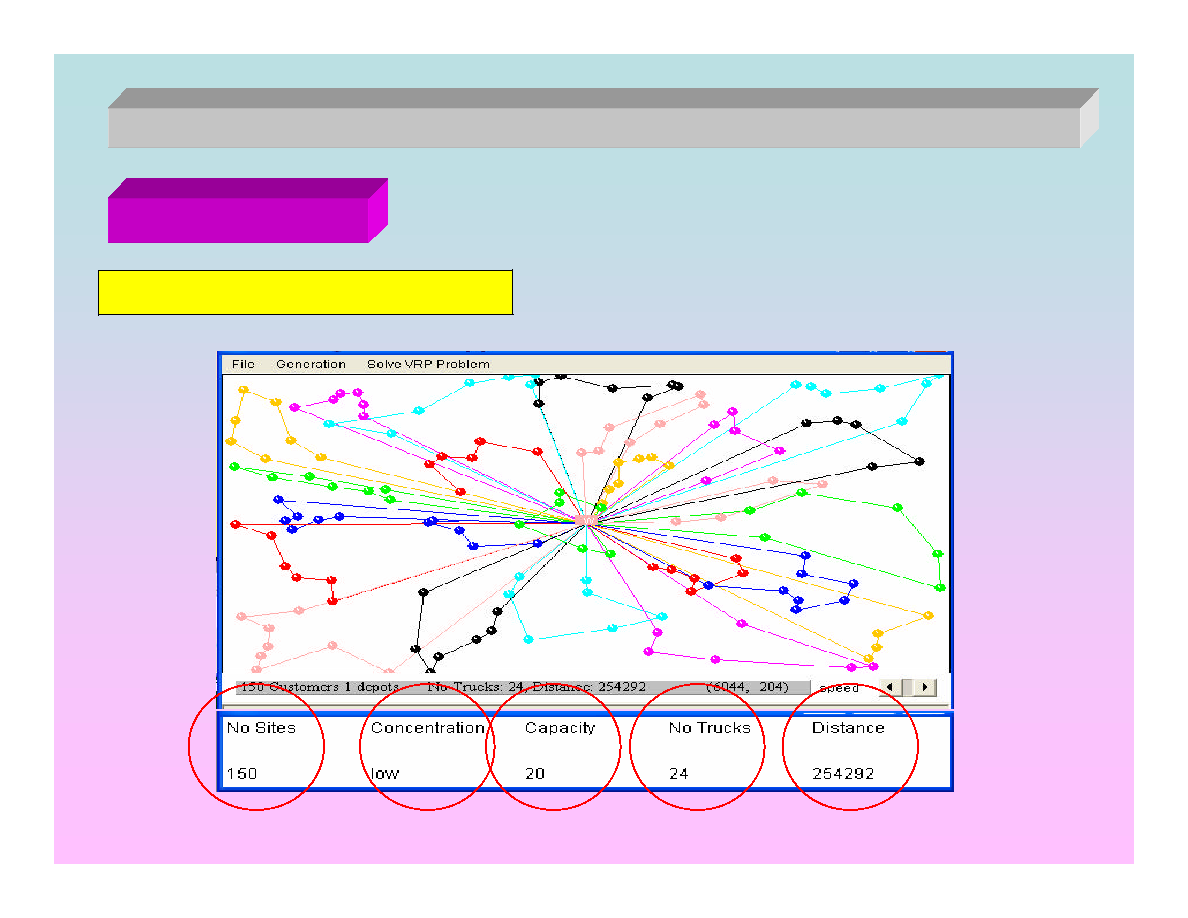
3. VRP Simulation: Result
Simulation of multi-agent objects inspired by Ants Behavior
Application